




码垛机中的输送带运输过程中跑偏该如何处理
当输送带跑偏时,带推动立锥辊,使固定在锥辊的座叉偏转一个角度,经拨销带动横销靠向侧托辊端面挡块,侧辊被制动,输送带与其产生滑动摩擦使托辊组架绕垂直轴转动一个角度,使带移向中心。
采用新型托辊现有托辊结构都是由管体、垫圈、轴承座、心轴、轴承、内外密封圈等组成。数量多、重量大,轴承座与管体连接可靠性差。为此,可采用新型的对旋螺弹簧形式的托辊,其结构由轴承座、固定在轴承座上的对旋弹簧、轴承、带钩头的心轴、密封圈、挡圈等组成。







码垛机是靠自身动力和控制能力来实现各种功能的一种机器。工业机器人控制技术的主要任务就是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等,关键技术包括:
模块化层次化的控制器软件系统,软件系统建立在基于开源的实时多任务操作系统Linux上,采用分层和模块化结构设计,以实现软件系统的开放性。整个控制器软件系统分为硬件驱动层、核丨心层和应用层。
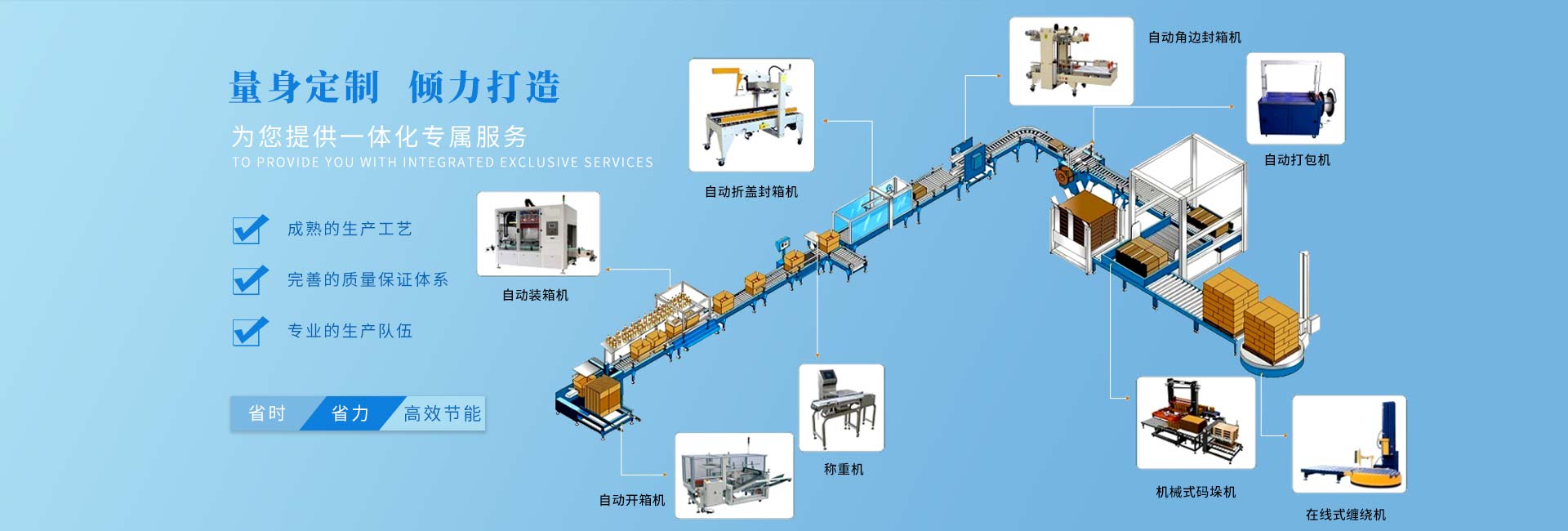
码垛机有很多种类,有设定在固定轨迹上完成工作的笛卡尔坐标码垛机,适应性码垛机以及安装更为复杂的平行四边形。而如今,市场上常见的码垛机主要包括:
1)线性卧式多关节码垛机:线性卧式多关节码垛机与全关节机器人具有相同的稳定性和更高的工作效率,并且具有与平行四边形结构码垛机相同的圆柱坐标系。也是矩形码垛机架构成本的
2)平行四边形码垛机:平行四边形码垛机通过复杂的铰链结构被两个线性轴放大。它有大量零件,而且安装复杂,但是它不需要算法支持,因此大多数低端码垛机都是基于此结构的原型。
3)全接头码垛机:全接头码垛机具有四个自由度,即四个旋转接头。它具有很强的适用性,广泛用于纸箱,塑料盒,瓶子,袋子,桶和薄膜中。包装产品和罐装产品的码垛结构设计简单,动作,码垛过程是全自动的,在正常运行过程中无需人工干预。
4)直角坐标码垛机:直角坐标码垛机也称为桁架码垛机或龙门码垛机。它是由XYZ直角坐标系驱动、伺服电机和步进电机驱动组成的单轴机床。手臂是基本的工作单元,可以到达XYZ三维坐标系中的任何点并遵循可控制的运动轨迹。


 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


