




自动式码垛机械手主要由执行器、驱动器组织和自动控制系统三大部分构成。手臂是用于抓持产品工件(或工具)的构件,依据被抓持物品的样式、规格、净重、材质和作业规定而有各类结构形式,如夹紧型、托持型和吸咐型等。运动组织,使手臂进行各类转动(晃动)、挪动或复合型运动来进行规定的姿式,改变被抓持物品的具体位置和姿势。







高位码垛机/码垛机器人无励磁制动器/仟岱无励磁离合器/无励磁刹车器
一:机械人永磁离合器机械手永磁刹车器.仟岱.三木电磁离合器 电磁刹车器 电磁制动器
二:台湾升阳.日本三菱磁粉离合器(加装磁粉)磁粉收卷器 磁粉制动器(加装铁粉)粉末制动器 粉末放卷器 .
三:机械全自动张力控制器MX02-4A卷径张力控制器-纠编张力控制器。
四:装配机械设备马达刹车器 东元刹车电机 西门子马达制动器 贝得电机刹车器
ABB电机制动器.各类电机安装刹车系统。
五:减速电机安装刹车器.伺服电机失电刹车器安装机械电机离合刹车组合系统
六:安全断电刹车马达整流器.伺服驱动电机停电制动器.产华机电刹车器。
七:.包装.印刷设备安全夹头气胀轴可定做.维修各类非标进口机械厂离合器刹车器保护器。

码垛机的工作原理
平板上工件符合栈板要求的一层工件,平板及工件向前移动直至栈板垂直面。上方挡料杆下降,另三方定位挡杆起动夹紧,此时平板复位。各工件下降到栈板平面,栈板平面与平板底面相距10mm,栈板下降一个工件高度。往复上述直到栈板堆码达到设定要求。
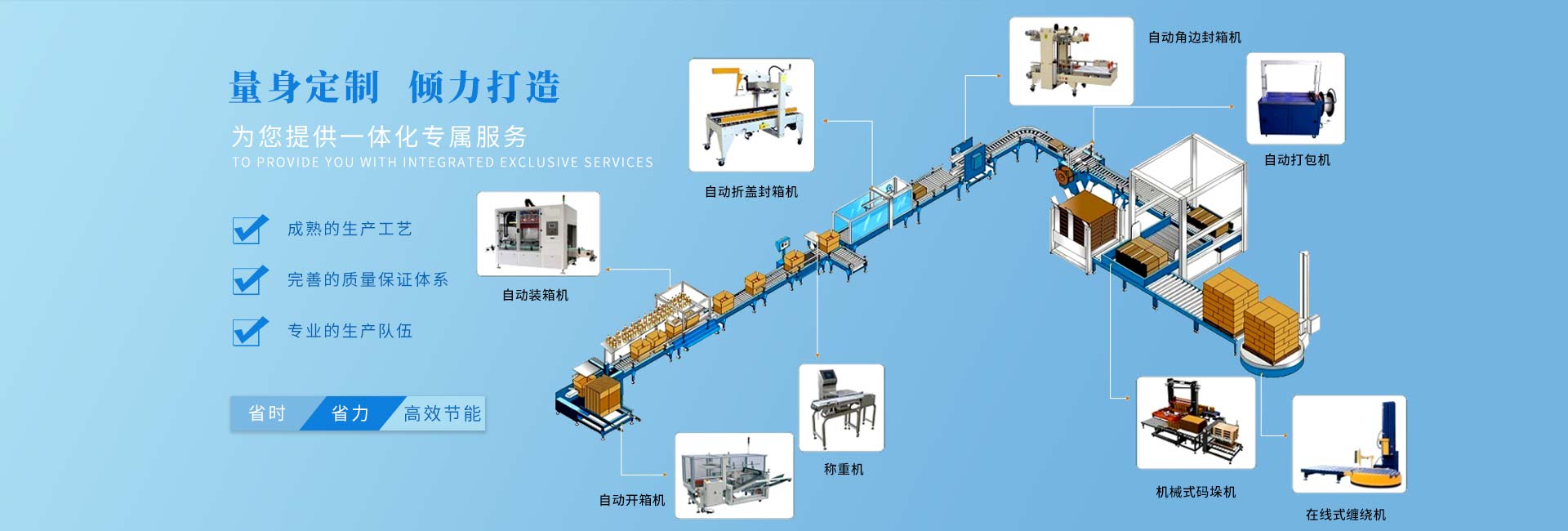
我厂生产自动化设备多年,有丰富的独自研发经验,生产的码垛机功能全,样式多,可根据客户要求提供包装系统解决方案。欢迎新老客户来电咨询。



 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


