









全自动码垛机机械选择的时候要注意:
方法一:荷重
机械手的荷重是指包括夹具、抱具、吸盘架等特殊冶具和产品重量在一起的总重量。在旋臂式机械手的选型时,要特别注意产品冶具的重量不以超过机器参数规定的80%,宿迁码垛机,否则,机械手的爪旋组比较容易损坏,影响机器的使用寿命。所以不是所有的注塑机都可以用注塑机机械手取产品的,码垛机厂商,有时需要用到侧取式机械手臂。
方法二:横行行程
机械手的横行行程指的是横走机械手横行方向的行程。在选型时主要考虑机台之间的间距是否够大,或者有无特殊要求,特别是两台机械手相邻一正一反安装时两台注塑机之间有没有足够的空间。
方法三:手臂行程
机械手的手臂行程是指手臂上下运动的位移。在选型时,要注意手臂有足够的行程取到产品。以下是手臂行程的经验计算公式:手臂行程=注塑机模板中心距+加高底座+手臂底端到基座底的距离+50mm

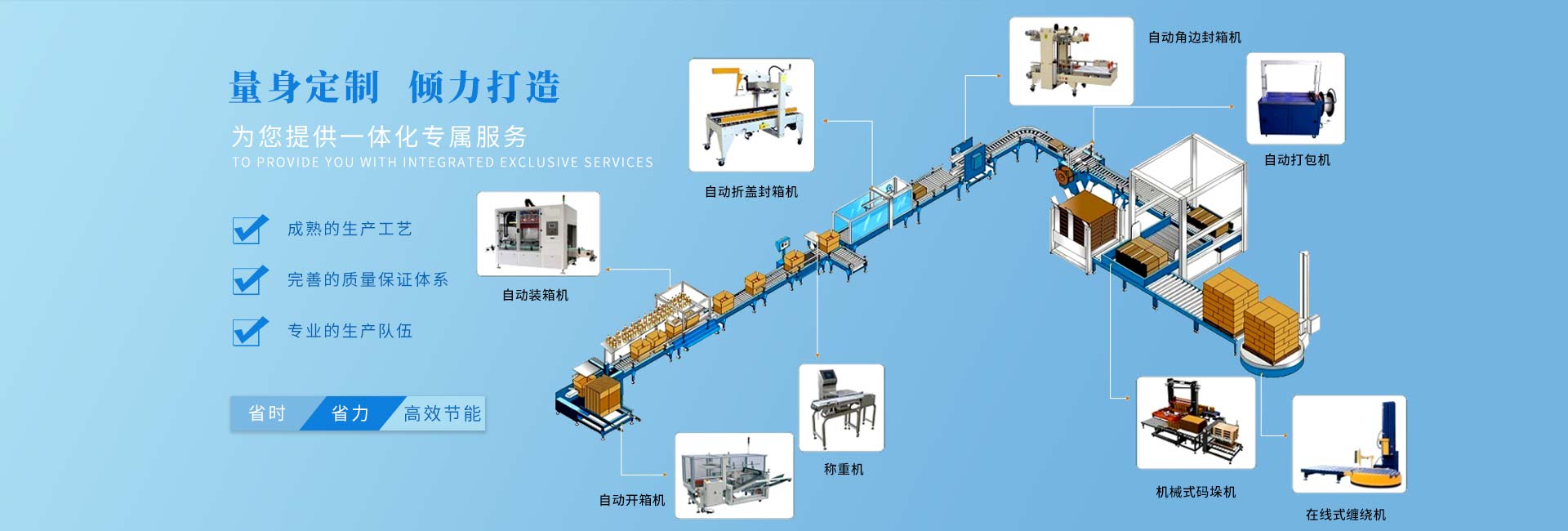
自动化码垛的现状尽管大多数制造公司在自动化生产过程的前端方面已取得了显着进步,但许多制造商仍然继续忽略更新他们自己的包装和码垛物流系统。让小编带你们分析一下,码垛机价格,两者带来的效率差距。常规码垛与机器人码垛解决方案的区别:
常规的码垛机通常使用一种分层技术,该技术形成箱子的包装图案,将它们通过挡板挤压成一定形状,然后一次将它们一层沉积到托盘上。该码垛机可分为两类-低级码垛机或高品质的码垛机。高品质的传统码垛机的操作方式与低级传统码垛机的操作非常相似,不同之处在于,它们通过使箱体层保持静止并代之以升高/降低货盘的方式,使码垛机以更高的速度成型为多层。
全自动码垛机因为比普通的机械式码垛机工作效率快、故障率低、容易保养,码垛机多少钱,因此被广泛的应用。全自动码垛机控制技术的主要任务就是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。全自动码垛机适用于化工、石油、涂料、油脂、颜料等企业,自动上托盘堆垛设备。 平板上工件符合栈板要求的一层工件,平板及工件向前移动直至栈板垂直面。上方挡料杆下降,另三方定位挡杆起动夹紧,此时平板复位。各工件下降到栈板平面,栈板平面与平板底面相距10mm,栈板下降一个工件高度。往复上述直到栈板堆码达到设定要求。全自动码垛机由控制器、自动上托盘设备、自动分离装置、移动横梁真空升降机械手、重托盘输送装置等组成。是机、电一体高新技术产品。


 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


